Category
INDEX



Unity逆魚眼レンズシェーダー
[Unity uGUI] 逆魚眼レンズシェーダー。糸巻歪曲収差の実装。
(Pincushion Shader)
#UnityShader

投稿日:2024-05-25

更新日:2025-07-12
関連ページ
参考URL
最近レトロフリークで遊ぶために、少年時代買えなかったSFCのソフトを大量に買い集めてます。
その中で天地創造というゲームのマップ移動がなかなか美しくて、これを自分の今の技術で真似てみようと考えていました。
天地創造のマップ表現は複数の技術を使っていて完コピとまでいきませんでしたが、ある程度コピーできたので共有します。
またこのシェーダーを応用した
FTLドライブシェーダー
もあるのでそちらもどうぞ。
 逆魚眼レンズの視覚効果は、正式には
逆魚眼レンズの視覚効果は、正式には
画面の中心から離れて端に近づくほど、ぐいっと手前に画像が近寄ってくる感じ。
下はこのシェーダーを作る動機となった、天地創造の動画になります。
天地創造の場合、画面の下4/3は単純なy軸のみの糸巻歪曲収差シェーダーを使っているように見えます。
対して残りの上1/4は、3~4つぐらいの技術を併用して描画してるように思う。
たぶん糸巻歪曲収差+y軸反転+色相を青色に寄せる+境目部分の黒いボヤけた表現など。
そもそも何十年も前の作品なので、今でいうシェーダーという技術は使ってなかったかもしれない。
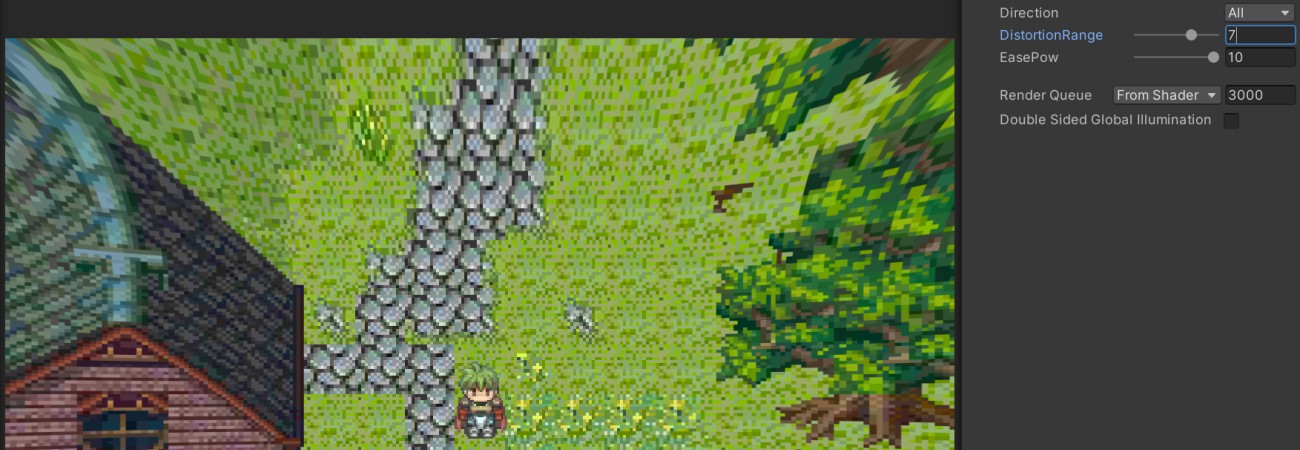
とりあえず自分がやりたかったのは画面の周囲が歪む糸巻歪曲収差の部分だったので、それを作りました。
下の動画はそのサンプル。
天地創造ではy軸のみの歪みを使っていましたが、このシェーダーではx軸+y軸、y軸のみ、x軸のみの3パターンを選べるようにしました。
糸巻歪曲収差処理はネットで検索してすぐ見つかったものの、そのコードが何をやってるかよく分かりませんでした。
なのでEaseを使って自前で実装しました。
見る人が見るとやたら長くて汚いコードに見えるかもしれません。
以下がそのコード全文です。uGUI Imageへの反映方法は
こちらの記事
参照。
今回の場合

 用意してあるプロパティは3つです。
用意してあるプロパティは3つです。
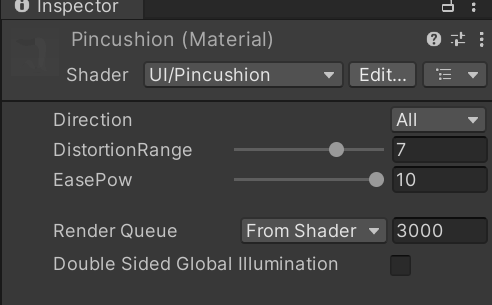
 : 歪みを掛ける方向。Allで全方位に歪みをかける。Verticalで縦方向、Horizontalで横方向のみ。
: 歪みを掛ける方向。Allで全方位に歪みをかける。Verticalで縦方向、Horizontalで横方向のみ。
: 外側から中心に向かう、歪みの効果範囲。0で歪みを掛けない、10で全画面に歪みを掛ける。
: 歪みの力。大きくすると、画面端に近づくほど極端に画面が歪む。初期値ですでに最大値にしてある。

その中で天地創造というゲームのマップ移動がなかなか美しくて、これを自分の今の技術で真似てみようと考えていました。
天地創造のマップ表現は複数の技術を使っていて完コピとまでいきませんでしたが、ある程度コピーできたので共有します。
逆魚眼レンズシェーダー概要
糸巻歪曲収差
と言います。画面の中心から離れて端に近づくほど、ぐいっと手前に画像が近寄ってくる感じ。
天地創造の場合、画面の下4/3は単純なy軸のみの糸巻歪曲収差シェーダーを使っているように見えます。
対して残りの上1/4は、3~4つぐらいの技術を併用して描画してるように思う。
たぶん糸巻歪曲収差+y軸反転+色相を青色に寄せる+境目部分の黒いボヤけた表現など。
そもそも何十年も前の作品なので、今でいうシェーダーという技術は使ってなかったかもしれない。
下の動画はそのサンプル。
天地創造ではy軸のみの歪みを使っていましたが、このシェーダーではx軸+y軸、y軸のみ、x軸のみの3パターンを選べるようにしました。
逆魚眼レンズシェーダー、コード全文
なのでEaseを使って自前で実装しました。
見る人が見るとやたら長くて汚いコードに見えるかもしれません。
今回の場合
GrabPass
を使っているので、
こちら
の知識も必要になる。Shader "UI/Pincushion"
{
Properties
{
[HideInInspector]_MainTex("-",2D)="white"{}
[KeywordEnum(All, Vertical, Horizontal)] _Direction("Direction", Int) = 0
_DistortionRange ("DistortionRange", Range(0.0, 10.0)) = 5
_EasePow ("EasePow", Range(0, 10)) = 10
}
SubShader
{
Tags
{
"Queue" = "Transparent"
"RenderType"="Transparent"
}
Cull Off
ZWrite Off
Blend SrcAlpha OneMinusSrcAlpha
GrabPass{}
Pass
{
CGPROGRAM
#pragma vertex vert
#pragma fragment frag
#include "UnityCG.cginc"
sampler2D _GrabTexture;
#pragma multi_compile _DIRECTION_ALL _DIRECTION_VERTICAL _DIRECTION_HORIZONTAL
fixed _DistortionRange;
fixed _EasePow;
struct appdata
{
fixed4 vertex : POSITION;
fixed4 uv : TEXCOORD0;
};
struct v2f
{
fixed4 vertex : SV_POSITION;
fixed2 uv : TEXCOORD0;
};
v2f vert(appdata i)
{
v2f o;
o.vertex = UnityObjectToClipPos(i.vertex);
o.uv = ComputeGrabScreenPos(o.vertex);
return o;
}
fixed2 getIsUnderHalf(v2f i)
{
fixed isUnderHalfX = step(i.uv.x, 0.5);
fixed isUnderHalfY = step(i.uv.y, 0.5);
return fixed2(isUnderHalfX, isUnderHalfY);
}
fixed2 getFarFromSafe(v2f i)
{
fixed fixRange = _DistortionRange * 0.1;
fixed safeRange = 1 - fixRange;
fixed farFromSafeX = abs(0.5 - i.uv.x) - (safeRange / 2);
fixed farFromSafeY = abs(0.5 - i.uv.y) - (safeRange / 2);
return fixed2(farFromSafeX, farFromSafeY);
}
fixed2 getFarFromCenter(v2f i)
{
fixed farFromCenterX = abs(0.5 - i.uv.x);
fixed farFromCenterY = abs(0.5 - i.uv.y);
return fixed2(farFromCenterX, farFromCenterY);
}
fixed2 getMainDist(fixed2 farFromSafe)
{
fixed quadX = farFromSafe.x * (farFromSafe.x - 2);
fixed quadY = farFromSafe.y * (farFromSafe.y - 2);
fixed fixEase = 12.7 - _EasePow;
fixed mainDistX = quadX * quadX / fixEase;
fixed mainDistY = quadY * quadY / fixEase;
return fixed2(mainDistX, mainDistY);
}
fixed2 getSubDist(fixed2 farFromCenter, fixed2 mainDist)
{
fixed subDistX = farFromCenter.x * mainDist.y;
fixed subDistY = farFromCenter.y * mainDist.x;
return fixed2(subDistX, subDistY);
}
fixed2 getMainReduce(fixed2 isUnderHalf, fixed2 mainDist)
{
fixed mainReduceX = (isUnderHalf.x * mainDist.x) + ((1 - isUnderHalf.x) * -1 * (mainDist.x));
fixed mainReduceY = (isUnderHalf.y * mainDist.y) + ((1 - isUnderHalf.y) * -1 * (mainDist.y));
return fixed2(mainReduceX, mainReduceY);
}
fixed2 getSubReduce(fixed2 isUnderHalf, fixed2 subDist)
{
fixed subReduceX = (isUnderHalf.x * subDist.x) + ((1 - isUnderHalf.x) * -1 * (subDist.x));
fixed subReduceY = (isUnderHalf.y * subDist.y) + ((1 - isUnderHalf.y) * -1 * (subDist.y));
return fixed2(subReduceX, subReduceY);
}
fixed2 getUseDist(fixed2 farFromSafe)
{
fixed useDistX = step(0, farFromSafe.x);
fixed useDistY = step(0, farFromSafe.y);
return fixed2(useDistX, useDistY);
}
fixed4 frag(v2f i) : SV_Target
{
fixed2 isUnderHalf = getIsUnderHalf(i);
fixed2 farFromSafe = getFarFromSafe(i);
fixed2 farFromCenter = getFarFromCenter(i);
fixed2 mainDist = getMainDist(farFromSafe);
fixed2 subDist = getSubDist(farFromCenter, mainDist);
fixed2 mainReduce = getMainReduce(isUnderHalf, mainDist);
fixed2 subReduce = getSubReduce(isUnderHalf, subDist);
fixed2 useDist = getUseDist(farFromSafe);
#ifdef _DIRECTION_ALL
i.uv.x = i.uv.x + useDist.x * mainReduce.x + useDist.y * subReduce.x;
i.uv.y = i.uv.y + useDist.y * mainReduce.y + useDist.x * subReduce.y;
#elif _DIRECTION_VERTICAL
i.uv.x = i.uv.x + useDist.y * subReduce.x * 2;
i.uv.y = i.uv.y + useDist.y * mainReduce.y;
#else
i.uv.x = i.uv.x + useDist.x * mainReduce.x;
i.uv.y = i.uv.y + useDist.x * subReduce.y * 2;
#endif
fixed4 col = tex2D(_GrabTexture, i.uv);
return col;
}
ENDCG
}
}
}
{
Properties
{
[HideInInspector]_MainTex("-",2D)="white"{}
[KeywordEnum(All, Vertical, Horizontal)] _Direction("Direction", Int) = 0
_DistortionRange ("DistortionRange", Range(0.0, 10.0)) = 5
_EasePow ("EasePow", Range(0, 10)) = 10
}
SubShader
{
Tags
{
"Queue" = "Transparent"
"RenderType"="Transparent"
}
Cull Off
ZWrite Off
Blend SrcAlpha OneMinusSrcAlpha
GrabPass{}
Pass
{
CGPROGRAM
#pragma vertex vert
#pragma fragment frag
#include "UnityCG.cginc"
sampler2D _GrabTexture;
#pragma multi_compile _DIRECTION_ALL _DIRECTION_VERTICAL _DIRECTION_HORIZONTAL
fixed _DistortionRange;
fixed _EasePow;
struct appdata
{
fixed4 vertex : POSITION;
fixed4 uv : TEXCOORD0;
};
struct v2f
{
fixed4 vertex : SV_POSITION;
fixed2 uv : TEXCOORD0;
};
v2f vert(appdata i)
{
v2f o;
o.vertex = UnityObjectToClipPos(i.vertex);
o.uv = ComputeGrabScreenPos(o.vertex);
return o;
}
fixed2 getIsUnderHalf(v2f i)
{
//x軸が0.5より小さければ1を代入
fixed isUnderHalfX = step(i.uv.x, 0.5);
//y軸が0.5より小さければ1を代入
fixed isUnderHalfY = step(i.uv.y, 0.5);
return fixed2(isUnderHalfX, isUnderHalfY);
}
fixed2 getFarFromSafe(v2f i)
{
fixed fixRange = _DistortionRange * 0.1;
fixed safeRange = 1 - fixRange;
fixed farFromSafeX = abs(0.5 - i.uv.x) - (safeRange / 2);
fixed farFromSafeY = abs(0.5 - i.uv.y) - (safeRange / 2);
return fixed2(farFromSafeX, farFromSafeY);
}
fixed2 getFarFromCenter(v2f i)
{
fixed farFromCenterX = abs(0.5 - i.uv.x);
fixed farFromCenterY = abs(0.5 - i.uv.y);
return fixed2(farFromCenterX, farFromCenterY);
}
fixed2 getMainDist(fixed2 farFromSafe)
{
//InQuadのEaseでfarFromSafeが大きい程指数関数的に座標がずれるようにする
fixed quadX = farFromSafe.x * (farFromSafe.x - 2);
fixed quadY = farFromSafe.y * (farFromSafe.y - 2);
//指数関数の伸びが強すぎるのでfixEaseで抑える
//_EasePowのrangeが0~10なのでfixEaseの振れ幅は12.7~2.7
fixed fixEase = 12.7 - _EasePow;
fixed mainDistX = quadX * quadX / fixEase;
fixed mainDistY = quadY * quadY / fixEase;
return fixed2(mainDistX, mainDistY);
}
fixed2 getSubDist(fixed2 farFromCenter, fixed2 mainDist)
{
fixed subDistX = farFromCenter.x * mainDist.y;
fixed subDistY = farFromCenter.y * mainDist.x;
return fixed2(subDistX, subDistY);
}
fixed2 getMainReduce(fixed2 isUnderHalf, fixed2 mainDist)
{
fixed mainReduceX = (isUnderHalf.x * mainDist.x) + ((1 - isUnderHalf.x) * -1 * (mainDist.x));
fixed mainReduceY = (isUnderHalf.y * mainDist.y) + ((1 - isUnderHalf.y) * -1 * (mainDist.y));
return fixed2(mainReduceX, mainReduceY);
}
fixed2 getSubReduce(fixed2 isUnderHalf, fixed2 subDist)
{
fixed subReduceX = (isUnderHalf.x * subDist.x) + ((1 - isUnderHalf.x) * -1 * (subDist.x));
fixed subReduceY = (isUnderHalf.y * subDist.y) + ((1 - isUnderHalf.y) * -1 * (subDist.y));
return fixed2(subReduceX, subReduceY);
}
fixed2 getUseDist(fixed2 farFromSafe)
{
//x軸が歪み対象エリア内かどうか
fixed useDistX = step(0, farFromSafe.x);
//y軸が歪み対象エリア内かどうか
fixed useDistY = step(0, farFromSafe.y);
return fixed2(useDistX, useDistY);
}
fixed4 frag(v2f i) : SV_Target
{
//対象のy軸とx軸座標が中心点を超えてるかどうかを習得
fixed2 isUnderHalf = getIsUnderHalf(i);
//非歪みエリアから外側にx軸、y軸がどれだけ離れてるかを取得
fixed2 farFromSafe = getFarFromSafe(i);
//中心からx軸、y軸がどれだけ離れてるかを取得
fixed2 farFromCenter = getFarFromCenter(i);
//メインの歪みの基本値を取得
fixed2 mainDist = getMainDist(farFromSafe);
//サブの歪みの基本値を取得
fixed2 subDist = getSubDist(farFromCenter, mainDist);
//メインの座標の減退値を取得
fixed2 mainReduce = getMainReduce(isUnderHalf, mainDist);
//サブの座標の減退値を取得
fixed2 subReduce = getSubReduce(isUnderHalf, subDist);
//対象のx軸、y軸が歪み対象エリア内かどうか
fixed2 useDist = getUseDist(farFromSafe);
#ifdef _DIRECTION_ALL
i.uv.x = i.uv.x + useDist.x * mainReduce.x + useDist.y * subReduce.x;
i.uv.y = i.uv.y + useDist.y * mainReduce.y + useDist.x * subReduce.y;
#elif _DIRECTION_VERTICAL
i.uv.x = i.uv.x + useDist.y * subReduce.x * 2;
i.uv.y = i.uv.y + useDist.y * mainReduce.y;
#else
i.uv.x = i.uv.x + useDist.x * mainReduce.x;
i.uv.y = i.uv.y + useDist.x * subReduce.y * 2;
#endif
fixed4 col = tex2D(_GrabTexture, i.uv);
return col;
}
ENDCG
}
}
}
プロパティを解説
Direction
DistortionRange
EasePow
Direction
で歪みの方向を変化できます。左から All
、 Vertical
、 Horizontal
です。
EasePow
は初期値で最大にしてありますが、歪みが強すぎると思う人は小さくするとその分歪みが柔らかくなります。